Google Classroom
Google Classroom
GeoGebra
GeoGebra Classroom
Bejelentkezés
Keres
Google Classroom
Google Classroom
GeoGebra
GeoGebra Classroom
Áttekintés
Further Maths A Level 2017
Matrix Transformation 2D
Determinants and Inverses
Matrix Transformation 3D
Invariant lines
Series
A2 Ch 8.Series and Limits
A2 Ch 12. First order DE
A2 Ch13. Numerical Methods
A2 Ch 16. Differential Equations
Further Maths A Level 2017
Szerző:
Nicola Trubridge
Tartalomjegyzék
Matrix Transformation 2D
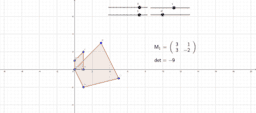
Matrix Transformations 2x2
2x2 Matrix Transformation
Matrix Transformations
Linear Transformations v2
Determinants and Inverses
Determinants and inverse matrices
Matrix Transformation 3D
Matrix transformations 3D
Invariant lines
Invariant lines of Matrix Transformations
Eigenvalues & Eigenvectors
Eigenvalues & Eigenvectors calculator
Eigenvalues & Eigenvectors (3 by 3)
Series
Maclaurin series approximations
Maclaurin polynomials
Maclaurin series for sinx
Maclaurin polynomials
A2 Ch 8.Series and Limits
Finding and using Maclaurin series
L'Hopital's Rule Visual
Verification of L'Hopital's Rule
Visual Demo of L'Hopitals Rule
Visualizing L'Hopital's Rule
A2 Ch 12. First order DE
Slope Field Ex 12.3
Slope Field Ex 12.4
A2 Ch13. Numerical Methods
Definite Integral Illustrator
Simpsons Rule
Comparing Numeric Integration Methods
Numerical Integration
Numeric Integration
Numeric Integration LR
Simpson's Rule Example 2
Euler's Method
Euler's Method
Euler's Method
A2 Ch 16. Differential Equations
The (linearly) damped motion of a spring
Free Vibrations with Damping
Forced Vibrations With Damping
Damped harmonic oscillator (small screens)
Second Order Linear DE solver
2nd order differential equations
EX16.3 Further SHM Calculations
Simple Harmonic Motion
Következő
Matrix Transformations 2x2
Új anyagok
apec
Trefoil Knot
Slope Between 2 Points (Phase 2)
Angle Addition: Warm Up Exercises
Cartesian vs Polar
Anyagok felfedezése
test
incenter-hunter jackson
Triangle bisector segments
การแยกตัวประกอบของพหุนามดีกรีสอง
Rectangle rule 5 ordinates
Témák felfedezése
Sokszögek
Beírt kör vagy beírható kör
Kalkulus
Kör
Vektorok