Detecting objects
Programming hints
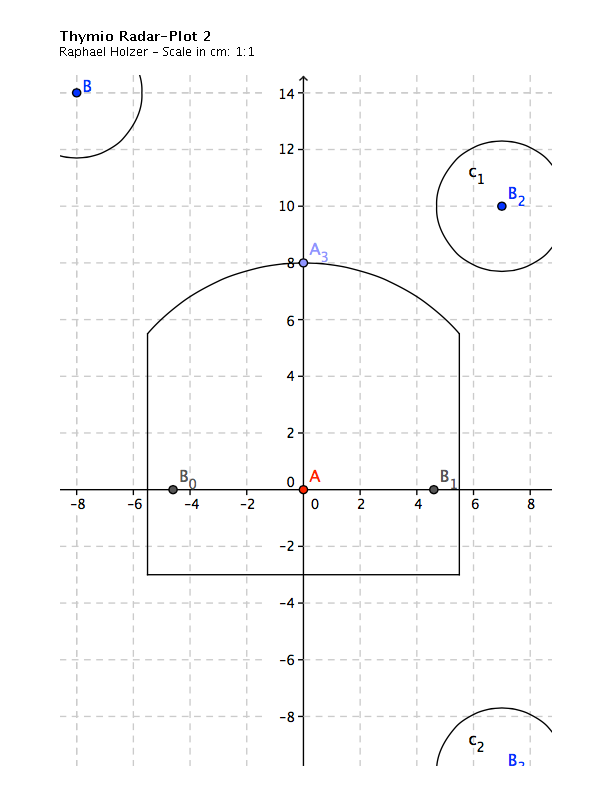
Place the robot at the starting position and program it to make a full 360° turn. While turning record the horizontal proximity sensor values and download the data afterwards your computer to be presented under the form of a radar plot (with LibreOffice for example). Determine the closest object and have the robot turn back to the position facing the closest object.
Preview of the printed A4 worksheet