Robotic arm simulation
What is expected to be learnt with this applet
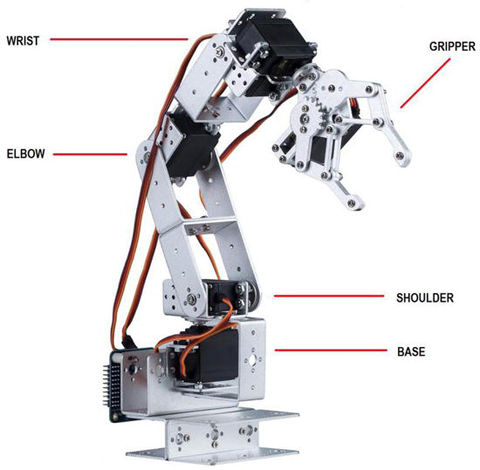
This applet generated with GeoGebra has been conceived as a STEM (Science, Technology, Engineering and Mathematics) activity. Robotics arm different parts take their names from human arm, because of the similarity of its movements. Shoulder, elbow and wrist describe rotations throughout different axes.
This Robotic Arm simulation uses several sliders for the translation and the three rotations throughout shoulder, elbow, wrist and grippers as well. I hope you enjoy and learn. For the next version of this applet, I will try to convert it in a game, so you can grab some objects and moved them to different places!
Robotic arm part names