Google Classroom
Google Classroom
GeoGebra
GeoGebra Classroom
Abrir sesión
Buscar
Google Classroom
Google Classroom
GeoGebra
GeoGebra Classroom
Esquema
MMT: Synthesis of Mechanisms
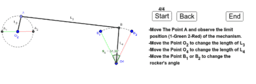
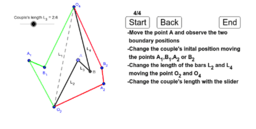
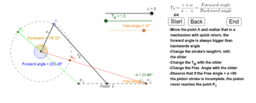
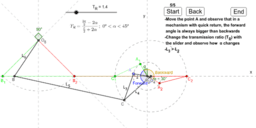
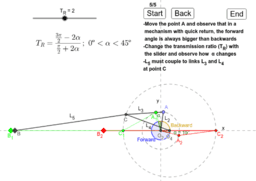
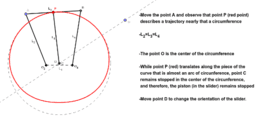
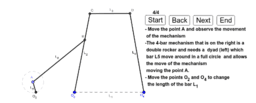
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
Synthesis of two angular positions with no Quick Return
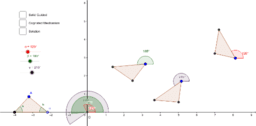
Synthesis of two positions for the coupler
Synthesis of a four bar for 3 posess
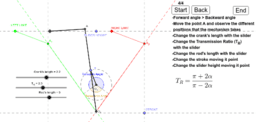
Synthesis of two angular position follower with Quick Retu
Synthesis of a slider crank with quick return
Synthesis of a Double 4-bar Quick Return
Synthesis of a 6 bar quick return slider crank
Synthesis of a Quick Return Mechanism
Synthesis of trajectory generation for 3 points in specified
Synthesis of 4 bar for 3 coupler's points
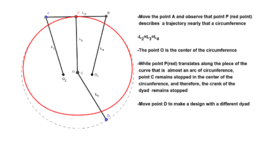
Single dwell with dyad
Single Dwell Mechanism with slider
Double rocker mechanism with dyad
MMT: Synthesis of Mechanisms
Autor:
Andereguillor
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
Synthesis of two angular positions with no Quick Return
Synthesis of two positions for the coupler
Synthesis of a four bar for 3 posess
Synthesis of two angular position follower with Quick Retu
Synthesis of a slider crank with quick return
Synthesis of a Double 4-bar Quick Return
Synthesis of a 6 bar quick return slider crank
Synthesis of a Quick Return Mechanism
Synthesis of trajectory generation for 3 points in specified
Synthesis of 4 bar for 3 coupler's points
Single dwell with dyad
Single Dwell Mechanism with slider
Double rocker mechanism with dyad
Siguiente
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
Nuevos recursos
Hyperbolic Paraboloid
Slope and Road Signs
¿Quién llegará más lejos en el mundial?
Fourier Lissajous (Mechanical)
Model sferyczny - dwunastościan-dwudziestościan
Descubrir recursos
Leda Atòmica de Salvador Dalí
GeoGebra's sense is odd.
Cyclic_4
Special Right Triangle (II)
JavaScript Array Methods in Geogebra
Descubre temas
Intervalo de Confianza
Polígonos
Baricentro
Medias
Probabilidad Condicional